![[Uncaptioned image]](ferret_icon.jpg) Ferret-v2: An Improved Baseline for Referring and Grounding with Large Language Models
Ferret-v2: An Improved Baseline for Referring and Grounding with Large Language Models
Abstract
While Ferret seamlessly integrates regional understanding into the Large Language Model (LLM) to facilitate its referring and grounding capability, it poses certain limitations: constrained by the pre-trained fixed visual encoder and failed to perform well on broader tasks. In this work, we unveil Ferret-v2, a significant upgrade to Ferret, with three key designs. (1) Any resolution grounding and referring: A flexible approach that effortlessly handles higher image resolution, improving the model’s ability to process and understand images in greater detail. (2) Multi-granularity visual encoding: By integrating the additional DINOv2 encoder, the model learns better and diverse underlying contexts for global and fine-grained visual information. (3) A three-stage training paradigm: Besides image-caption alignment, an additional stage is proposed for high-resolution dense alignment before the final instruction tuning. Experiments show that Ferret-v2 provides substantial improvements over Ferret and other state-of-the-art methods, thanks to its high-resolution scaling and fine-grained visual processing. ††Equal contribution.

1 Introduction
Multimodal Large Language Models (MLLMs) (Koh et al., 2023; Wu et al., 2023a; Yang et al., 2023; Liu et al., 2023d; Wu et al., 2023c; Li et al., 2023d; Ye et al., 2023; Wu et al., 2023b; Li et al., 2023a; Wang et al., 2023a; Gao et al., 2024; McKinzie et al., 2024) have increasingly become pivotal in the recent surge of advancements in AI, serving as foundational elements in the development of versatile general-purpose assistants. However, these methods were built on coarse image-level alignments, which suffer from fine-grained understanding (such as region description and reasoning). To this end, Peng et al. (2023); Chen et al. (2023b); You et al. (2023) integrate the grounding abilities and unlock the referential ability in dialogue, i.e., enable the user to point to the object or region as input, and the model response with spatial coordinates of bounding boxes. This advancement enables MLLMs to perform tasks requiring detailed visual understanding, marking significant progress in the field.
While grounding and referring MLLMs exhibit strong performance, there are still many challenges that remain unresolved. For example, the aforementioned methods use CLIP (Jiang et al., 2023) or its variants (Sun et al., 2023) as the vision encoder. As the pre-trained image encoders normally adopt a relatively low image resolution, e.g., 224×224, it severely hinders fine-grained visual comprehension for MLLMs. Though some task-specific MLLMs (Lv et al., 2023; Hong et al., 2023; Ye et al., 2023) have explored strategies for upscale processing, these approaches are marred by undue complexity for their own domains and cannot perform well on traditional MLLM benchmarks. Thus, the scenario prompts a critical inquiry: how can we enhance the capabilities of MLLMs to excel in detailed vision-related tasks without compromising their proficiency in global reasoning?
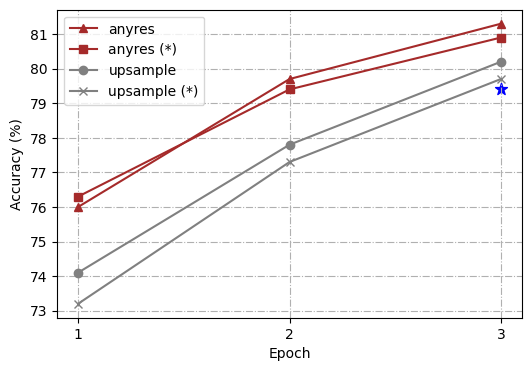
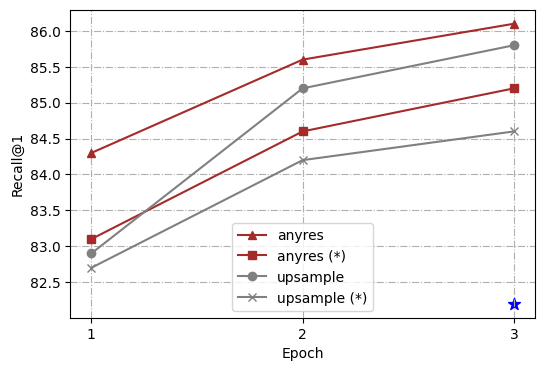
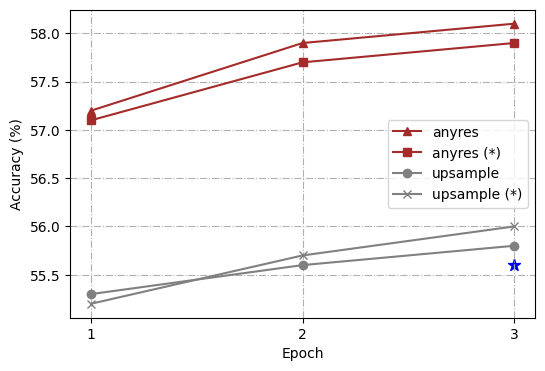
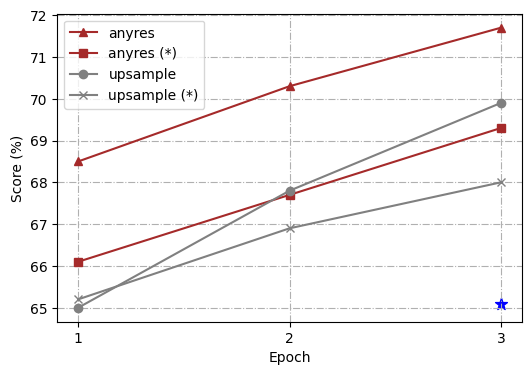
To answer this question, we explore the potential from three aspects, i.e., higher-resolution scaling, multi-granularity visual encoding, and model training recipes. We choose Ferret (You et al., 2023) as the robust baseline since it has two advantages: (i) mutual benefits between referring and grounding, and (ii) more versatile referring capability (strokes, scribbles, or complex polygons). Firstly, we conduct a careful investigation into higher-resolution scaling, and evaluate the performance of two mainstream methods, “direct upsampling” (Wang et al., 2023a; Bai et al., 2023) and “any resolution” (Gao et al., 2024; Liu et al., 2024), on (i) Visual detail analysis (ROC (You et al., 2023) & REC (Kazemzadeh et al., 2014)), (ii) Resolution-critical OCR tasks (TextVQA (Singh et al., 2019)), and (iii) Reasoning MLLM benchmarks (Ferret-Bench (You et al., 2023)). Our analysis indicates that the “any resolution” approach outperforms “direct upsampling” in harnessing image details while retaining the knowledge acquired during pre-training for efficient scaling. This positions “any resolution” as a superior strategy for tasks requiring advanced visual comprehension.
By adopting the “any resolution” method, which involves dividing the image into sub-patches for processing by the CLIP encoder, we observed that incorporating both global context and high-resolution patches into visual embeddings introduces a nuanced complexity. This is because the two types of images exhibit distinct characteristics. To mitigate this gap, we propose the integration of a DINOv2 encoder (Oquab et al., 2023). Renowned for its proficiency in delineating finer details pertaining to local objects, DINOv2 promises to bolster the model’s ability to perceive fine-grained aspects. Additionally, we employ separate MLP projectors for each vision encoder to facilitate a deeper exploration of the varying contexts presented by global and fine-grained visual information, aiming for a more comprehensive understanding and representation.
Furthermore, the model is strategically trained in three stages, enhancing resolution handling while maintaining vision-language alignment in a “coarse-to-fine” manner. Initially, the model is trained on low-resolution images for efficient image-caption alignment. Subsequently, we recognize the gap that several downstream tasks demand a more accurate and thorough spatial understanding and go beyond just the broad semantics, so we specifically design the 2nd stage to align every possible local object of the image with detailed semantics with dense referring and detection data. Finally, the model undergoes visual instruction fine-tuning to better interpret user intent.
The contributions of this paper are summarized as follows: (i) We provide a thorough analysis of higher-resolution scaling, and found that the “any resolution” method consistently outperforms “direct upsampling”. (ii) Based on “any resolution”, we further propose multi-granularity visual encoding, where the low-resolution image is encoded via CLIP, while the high-resolution sub-patches are encoded via DINOv2. This strategy fosters a deeper understanding of both global and fine-grained visual contexts. (iii) Ferret-v2 is trained in a three-stage process, where an additional stage is proposed for high-resolution dense alignment before the final instruction tuning. Extensive experiments on a wide range of tasks, including referring and grounding, visual question answering, and modern MLLM benchmarks demonstrate the superiority of Ferret-v2 over existing works (see Fig. 1).
2 Background
Coarse-level MLLMs.
Motivated by the advanced reasoning abilities demonstrated by LLMs (OpenAI, 2022; Chowdhery et al., 2022; Touvron et al., 2023a, b; Zhang et al., 2022b; Wei et al., 2021), there is a growing interest in extending these skills to visual understanding, leading to the emergence of multimodal LLMs. For example, Flamingo (Alayrac et al., 2022) utilizes a cross-attention mechanism to enhance visual context awareness, enabling more sophisticated context-aware visual learning. Models such as LLaVA (Liu et al., 2023b, a) and MiniGPT-4 (Zhu et al., 2023) focus on synchronizing image and text features before applying instruction tuning. Additionally, BLIP-2 (Li et al., 2023d) and mPLUG-OWL (Ye et al., 2023) offer methods for incorporating image features using a visual encoder, which is then combined with textual embeddings in the LLM architecture. Nonetheless, despite their advancements, these MLLMs, including the latest GPT-4V (OpenAI, 2023), are limited to producing text outputs, restricting their application in scenarios that demand rich region-level visual perception.
Region-level MLLMs.
In recent investigations, there has been a growing focus on the convergence of foundation models and the tasks related to dense visual perception. For example, Li et al. (2023c); Zou et al. (2023); Koh et al. (2023) leverage the CLIP pre-trained foundation models to enable open-world detection, but they are unable to handle complex instructions. Differently, VisionLLM (Wang et al., 2023c) combines a range of vision-centric tasks by utilizing instruction tuning with LLMs. However, it may fall short of fully harnessing the potential of LLMs for handling intricate reasoning tasks. In parallel research efforts, grounding capabilities and open-vocabularies detectors are leveraged by Kosmos-2 (Peng et al., 2023), Qwen-VL (Bai et al., 2023) and DetGPT (Pi et al., 2023), enabling user-guided detection. Moreover, GPT4RoI (Zhang et al., 2023b), Shikra (Chen et al., 2023b), LLaVA-G (Zhang et al., 2023a), and Ferret (You et al., 2023) introduce spatial boxes as input and train the model using region-text pairs, offering regional image understanding. However, all the above methods utilize low-resolution image encoders and thus limit the capability of perceiving more detailed analysis.
3 Methods
We first revisit the design principles of Ferret in Sec. 3.1 and present the investigation into higher-resolution scaling in Sec. 3.2. Subsequently, in Sec. 3.3, we delve into advancements in the model architecture, including techniques for grounding and referring at any resolution, as well as visual encoding with multiple granularities. Finally, we introduce an enhanced training method aimed at refining the model’s proficiency in aligning global and local elements in Sec. 3.4.
3.1 A Revisit of Ferret
There has been a recent growing focus on the convergence of models (Zhang et al., 2023b; Chen et al., 2023b; Peng et al., 2023; Lai et al., 2023; Zhao et al., 2023; You et al., 2023) and the tasks related to visual perception. Ferret (You et al., 2023) distinguishes itself from other MLLMs by excelling in spatial referring and grounding within natural images of diverse shapes and levels of detail.
To refer to various types of regions, such as points, boxes, or free-form shapes, Ferret developed a hybrid region representation, where each region is referred to by a combination of discrete coordinate tokens and continuous region features, as well as region names if available. The coordinates are normalized into the range from 0 to 999, and a point or shape is respectively expressed by [] or []. The continuous region feature is extracted by a spatial-aware visual sampler that samples and aggregates features of the region. Ultimately, a region is represented by “region_name coordinates continuous_fea” and fed into the model for referring, e.g., “What is in the region [100, 50, 200, 300] continuous_fea?”. To achieve grounding, Ferret generates the box coordinates right after the corresponding regions/nouns in the text response, e.g., “There is a dog [100, 150, 300, 200] in the figure.”
Ferret encodes the image with a pre-trained visual encoder (CLIP-ViT-L/14) (Radford et al., 2021) and then feeds the image feature as additional tokens alongside the text input (and hybrid region representation if any) into a decoder-only language model (Vicuna (Zheng et al., 2023)). The training contains two stages, image-caption alignment and instruction-tuning, updated with the next-token-prediction loss.
While Ferret boasts flexibility and superior performance, it is hindered by the limitations imposed by the fixed resolution of its pre-trained encoder, which restricts its ability to fully exploit the advantages of enhanced region referring and localization accuracy. Motivated by this, we initially delve into identifying the most efficacious methods for high-resolution scaling. Subsequently, we unveil Ferret-v2, a substantial extension of the Ferret series, aimed at examining a broader and more inclusive multimodal learning framework.
3.2 Analysis of Higher Resolution Scaling
For further analysis, we conduct a series of controlled experiments using different high-resolution scaling methods, i.e., “direct upsampling”, and “any resolution”(Liu et al., 2024). The overall architecture and training process follows Ferret (You et al., 2023) but with a simple modification from a linear layer to a two-layer Multi-Layer Perceptron (MLP). Additionally, to enable the model to better handle short-form answers and perform on more benchmarks, we follow LLaVA 1.5 (Liu et al., 2023b) and add additional task-oriented datasets for VQA (Antol et al., 2015) and OCR to the existing GRIT (You et al., 2023), which was previously used in Ferret. To streamline our study, we choose 4 representative tasks: ROC (LVIS: box), REC (RefCOCOg), TextVQA, and Ferret-Bench, and measure the capability of the trained models comprehensively.
Direct upsampling v.s. Any resolution.
For uniformity in our experiment, we standardize on a target resolution of 448111The number of tokens is dynamic given different input image resolutions, but the maximum number of tokens is 1280. We chose 448 with computational overhead in mind., which is upscaled from 336 as the vision encoder’s pre-training resolution for both scaling methods to ensure identical image tokens are input into the LLMs. In the case of “direct upsampling”, positional embedding interpolation is applied, and the CLIP encoder is adjusted to this new resolution during the fine-tuning phase. For “any resolution”, we predefined a set of resolutions to support up to six grids222We use grid configurations of {1x1, 1x2, 1x3, 1x4, 1x5, 1x6, 2x2, 2x3, and their transpose}.. Given an image, we first select the optimal resolution by prioritizing fitting the original image’s aspect ratio and size as closely as possible while minimizing wasted resolution, and we resize the input image to the optimal resolution and split the image into these grids. All image patches are encoded by the CLIP encoder separately, and their features are input into LLMs as image tokens. We trained the models using both frozen and unfrozen encoder configurations.
As highlighted in Fig. 2, our comparative analysis revealed that the “any resolution" scaling method not only demonstrated significant improvements across all tasks over the vanilla Ferret but also outshined the “direct upsampling” approach. Another interesting observation is that in “any resolution”, updating the vision encoder always brings a boost over freezing it, whereas in “direct upsampling”, freezing the vision encoder is sometimes even better (as shown in the TextVQA result). As for the reason behind those findings, we hypothesize that “direct upsampling” forces the ViT to adapt to a higher resolution, which brings much longer token lengths deviated from its pre-training data. However, the scale of fine-tuning data is usually much smaller than the pre-training data of the vision encoder (1.3M vs. 400M in our setting), which disturbs its pre-training knowledge. On the contrary, “any resolution” crops the high-resolution image into patches, and the vision encoder processes local patches in a similar token length to its pre-training procedure. Overall, “any resolution” has proved to be a more optimal strategy that balances leveraging high-resolution images and preserving valuable pre-training knowledge for effective scaling.
3.3 Model Architecture
Multi-Granularity Visual Encoding.
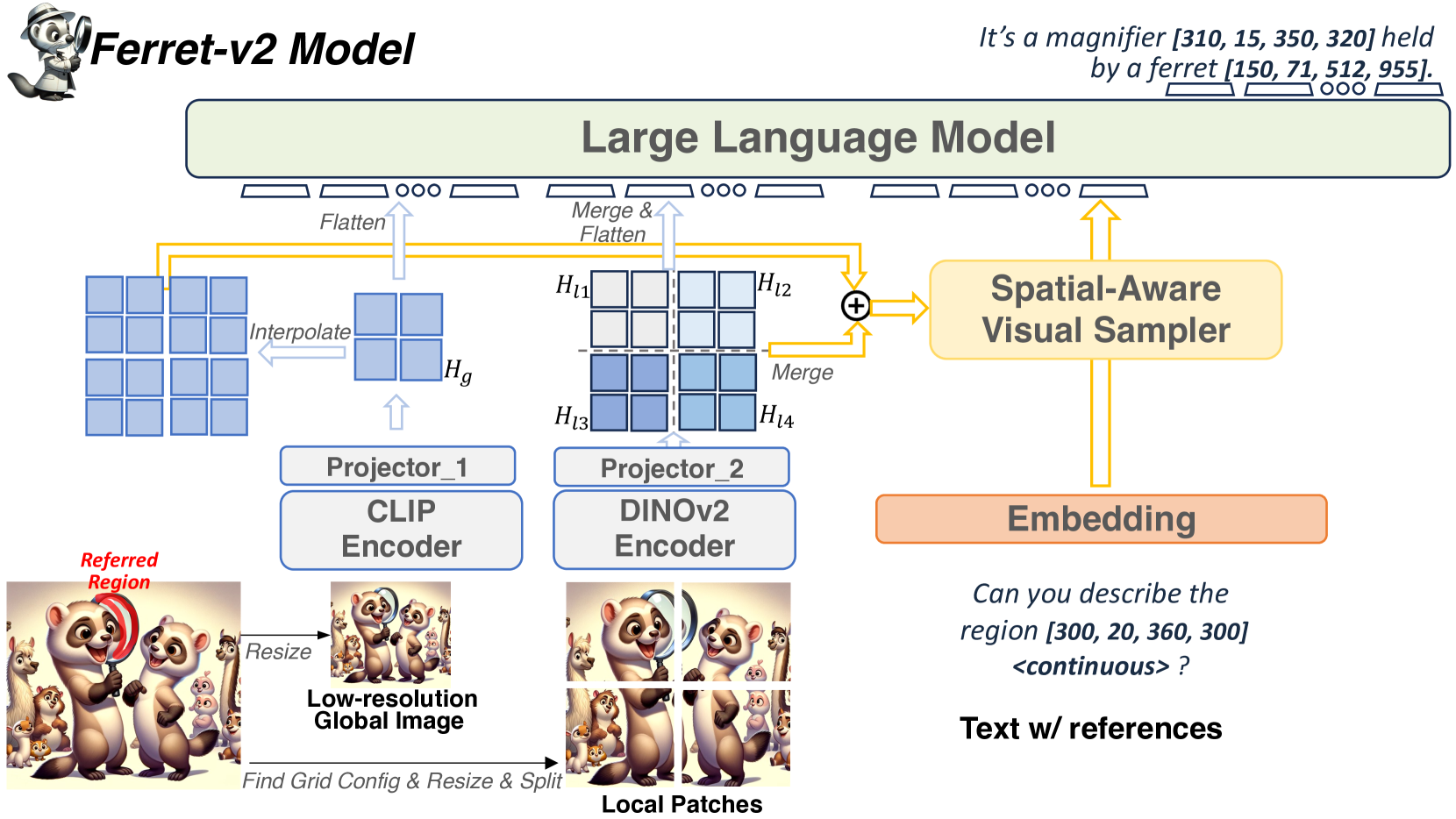
After devoting to the “any resolution” scaling method, yet another problem arises naturally: there is a granularity difference between global low-resolution image and local split image patches , i.e., the global image sees the entire scene but in a coarse resolution, while each local patch can see only a part of the scene but in precise detail.
To deal with this issue, we explore encoding those two types of images with distinct visual encoders. Specifically, we choose CLIP (Radford et al., 2021) to encode global images and DINOv2 (Oquab et al., 2023) to encode local split patches. Our motivation behind this comes from the difference in their pre-training paradigms. The image-text contrastive objective used in CLIP enables these models to capture image-level semantics from captions but tends to neglect the rich pixel-level details due to the limited fine-grained information in the guided captions. DINOv2, trained with self-supervision objectives of both image-level and patch-level, can capture more detailed information about local objects such as shape or texture and therefore possess fine-grained perception abilities. Furthermore, we employ separate MLP projectors for the dual vision encoders, aiming to differentiate and learn the diverse underlying contexts for global and fine-grained visual information:
| (1) | ||||
| (2) |
Then, the feature maps of local patches are merged into a large feature map according to its original arrangement and then flattened into a sequence of image features. The global image’s feature map is also flattened. Two sequences are connected and input into LLM as visual “tokens”.
Any resolution Referring.
The hybrid region representation introduced in Ferret has proved effective and versatile in handling various types of referring such as point, box, scribble, etc. What lies at the core of it is the extraction of continuous region features, which is performed by a Spatial-Aware Visual Sampler. However, directly feeding global image features into the visual sampler may not be sufficient to recognize the small referred objects in high-resolution images. Inspired by our previous findings about the visual granularity difference, we further propose to integrate the best of both global semantics and local details for more precise referring. To be more specific, after obtaining the encoded features of global image and local patches , we first merge the feature maps of local patches into a large feature map following their original spatial arrangement, and the global image feature map is upsampled via interpolation to align the size of the merged feature map.
| (3) | |||||
| (4) |
Then, we fuse the two processed feature maps by adding them channel-wise: , and obtain a high-resolution feature map with strong semantics and local awareness. The is input into a spatial-aware visual sampler (You et al., 2023) to extract continuous region features. Then the continuous feature is combined with discrete coordinates as a hybrid region representation to refer to any region in the image, as shown in Fig. 3.
Any resolution Grounding.
By combining visual embeddings from both global image and local sub-patches, our model can more effectively uncover visual details from high resolution and bridge the semantics. Without specific adaptation, our framework aligns seamlessly with the grounding design in Ferret; therefore, similarly, we delineate the output coordinate regions through an intuitive numerical representation and employ the LLM as the principal mechanism for deciphering the intrinsic correlations.
3.4 Training Paradigm
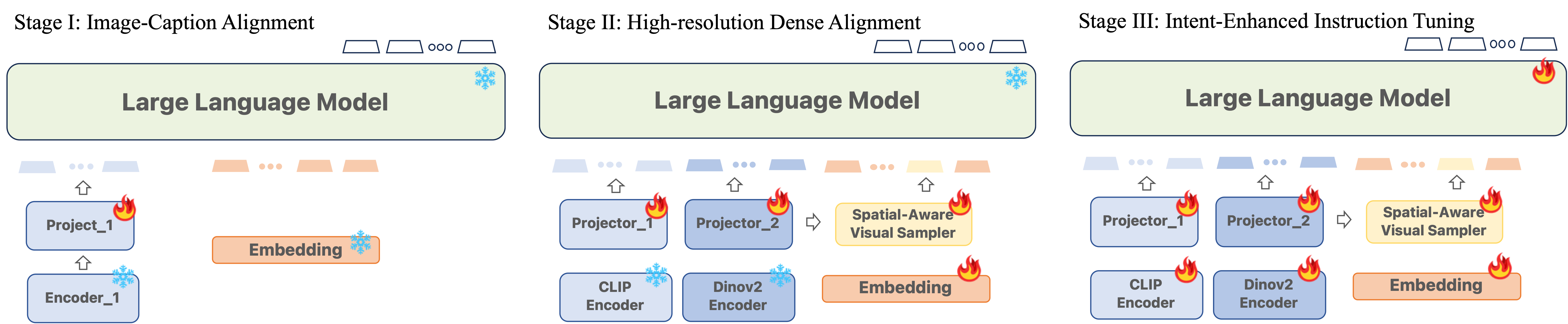
Stage I: Image-Caption Alignment.
Feature alignment before fine-tuning has been widely utilized to achieve better training efficiency. We adopt this strategy to connect the pre-trained CLIP encoder with the LLM using 1.4M image-text pairs, converted to instruction-following data by Chen et al. (2023c). The low-resolution image encoder and LLM parameters remain frozen, with only the projector trainable. Without any referring in these image-text pairs, the visual sampler does not participate in the training of Stage I.
Stage II: High-resolution Dense Alignment.
Although the previous image-caption alignment is effective in bridging vision and LLM in coarse semantics, there still exists a severe gap between the image-caption alignment and the instruction tuning stage. Many downstream tasks, such as referring, grounding, OCR, etc., require a more precise and comprehensive spatial perception of the image, beyond solely coarse semantics.
To alleviate the above mentioned issue, we propose a novel pre-training stage aiming at high-resolution dense alignment. Specifically, instead of aligning the entire image with a global caption, this stage aligns every possible local object of the image with detailed semantics. Correspondingly, two types of tasks and input data are designed. (1) Dense Referring: given the image, the input question refers to regions of all objects one by one and asks about their categories; the model is required to output the predicted classes accordingly. An example is “Question: Please classify the objects in the following locations. 1: region_1, 2: region_2, …. Answer: Here are the categories: 1: cat, 2: dog, …”. (2) Dense Detection: Given the image, the input question asks to localize all the objects. To reduce randomness and incorporate spatial awareness, we forge the answer to list objects in a certain order, such as raster scan order (from top to bottom, left to right). An example is “Question: Please localize visible objects in the image in a raster scan order. Answer: The objects are: 1: cat coordinate_1, 2: dog coordinate_2, …”. To ensure efficient learning of the fine-grained semantics, we collect data from densely annotated object dataset - LVIS (Gupta et al., 2019). On average, each sample includes around 10 object locations, whereas in the instruction tuning stage, referring and grounding datasets mostly have only one or two object locations mentioned per sample.
In terms of the model, we take a pre-trained DINOv2 as the visual encoder for local patches, in addition to the CLIP encoder for global images, as mentioned in Sec. 3.3. The projector after CLIP is inherited from the image-caption alignment stage, and we further add a separate projector after DINOv2, whose weights are initialized from the CLIP’s projector for stability. Then we freeze two vision encoders and LLMs, and only update the two projectors as well as the visual sampler in this alignment stage, with the next-token-prediction loss.
Stage III: Intent-Enhanced Instruction Tuning.
After the second stage of pre-training, the model acquires the capability for a comprehensive global understanding of images, alongside the ability to identify and narrate objects of interest using free-form texts and visually referred regions obtained flexibly. Our aim is to enhance the model’s adherence to user instructions while maintaining its high-resolution visual perception abilities. To achieve this, we render the encoders, projectors, region samplers, and the LLM itself trainable. For training, we utilize the GRIT dataset (You et al., 2023) and incorporate additional task-specific datasets for VQA (Antol et al., 2015) and OCR (Singh et al., 2019; Sidorov et al., 2020) from LLaVA 1.5 (Liu et al., 2023b). Furthermore, we identified two additional strategies that contribute to enhanced performance: (i) Data Unification: To facilitate the model’s seamless transition from a global understanding based on plain texts to a regional comprehension utilizing hybrid representations, we employ an open-vocabulary object detector, GLIPv2 (Zhang et al., 2022a), to localize groundable nouns in the text on VQA datasets, and a public OCR model (Kuang et al., 2021) to get text bounding boxes on OCR datasets. (ii) Task Generalization: In order to diminish ambiguity across tasks that necessitate referring and grounding capabilities and those that do not, we adopt a method similar to LLaVA 1.5, which involves appending the prompt, “Include the coordinates for each mentioned object.”, to further clarify task requirements.
4 Experiments
4.1 Referring and Grounding Tasks
Referring.
Ferret-v2’s enhanced understanding of referential queries is evident in its ability to interpret the semantics of specified regions within an image accurately. This is particularly assessed through the task of Referring Object Classification (ROC), where the model is tasked with identifying the object in a region mentioned in a query. Initially, like Ferret, we utilize the validation split of the LVIS dataset, covering more than 1,000 object categories with a majority being “in-domain” images. To further demonstrate Ferret-v2’s improved ability to reference smaller objects, we compile an “in-the-wild” evaluation set using partial images from SA-1B (Kirillov et al., 2023) and corresponding human annotations of objects from AS-human (Wang et al., 2023b), which contains high-resolution images, open-vocabulary objects and precise masks. In total, we manually verified 700+ high-quality samples with in-the-wild objects and called it SA-refer. As shown in Table 4.1, Ferret-v2 significantly outperforms previous models on LVIS and sets up a new benchmark not fully realized in prior Ferret, primarily contributing to high-resolution scaling. SPHINX also uses high-resolution input images; however, on more challenging tasks for SA-refer, Ferret-v2 still outperforms it, indicating the benefits of our special design for any resolution referring.
Grounding.
Visual grounding aims to ground language queries into aligned image regions. We experiment on the sub-tasks of referring expression comprehension (REC) with three renowned benchmarks: RefCOCO (Lin et al., 2014), RefCOCO+ (Yu et al., 2016), and RefCOCOg (Mao et al., 2016), and phrase grounding with Flickr30k Entities dataset (Plummer et al., 2015). As evidenced in Table 3, Ferret-v2 enables the use of high-resolution input images, leading to significant improvements over Ferret (You et al., 2023). Besides, Ferret-v2 outperforms most state-of-the-art models, including specialist model G-DINO-L (Liu et al., 2023c) and other generalist models, which adopt even larger input image sizes. Our 7B model can achieve comparable results to CogVLM-Grounding (Wang et al., 2023a), which utilizes a 4B vision model and a 6B connection module. These results demonstrate the competitive capability of Ferret-v2 for visual grounding.
| Models | RefCOCO | RefCOCO+ | RefCOCOg | Flickr30k Entities | ||||||
| val | testA | testB | val | testA | testB | val | test | val | test | |
| MAttNet (Yu et al., 2018) | 76.40 | 80.43 | 69.28 | 64.93 | 70.26 | 56.00 | 66.67 | 67.01 | – | – |
| OFA-L (Wang et al., 2022) | 79.96 | 83.67 | 76.39 | 68.29 | 76.00 | 61.75 | 67.57 | 67.58 | – | – |
| UNITER (Chen et al., 2020) | 81.41 | 87.04 | 74.17 | 75.90 | 81.45 | 66.70 | 74.02 | 68.67 | – | – |
| VILLA (Gan et al., 2020) | 82.39 | 87.48 | 74.84 | 76.17 | 81.54 | 66.84 | 76.18 | 76.71 | – | – |
| UniTAB (Yang et al., 2022) | 86.32 | 88.84 | 80.61 | 78.70 | 83.22 | 69.48 | 79.96 | 79.97 | 78.76 | 79.58 |
| MDETR (Kamath et al., 2021) | 86.75 | 89.58 | 81.41 | 79.52 | 84.09 | 70.62 | 81.64 | 80.89 | 82.3* | 83.8* |
| G-DINO-L (Liu et al., 2023c) | 90.56* | 93.19* | 88.24* | 82.75* | 88.95* | 75.92* | 86.13* | 87.02* | – | – |
| Shikra-7B (Chen et al., 2023b) | 87.01 | 90.61 | 80.24 | 81.60 | 87.36 | 72.12 | 82.27 | 82.19 | 75.84 | 76.54 |
| MiniGPT-v2-7B (Chen et al., 2023a) | 88.06 | 91.29 | 84.30 | 79.58 | 85.52 | 73.32 | 84.19 | 84.31 | – | – |
| Qwen-VL-7B (Bai et al., 2023) | 88.55 | 92.27 | 84.51 | 82.82 | 88.59 | 76.79 | 85.96 | 86.32 | – | – |
| SPHINX-2k (Lin et al., 2023) | 91.10 | 92.88 | 87.07 | 85.51 | 90.62 | 80.45 | 88.07 | 88.65 | – | – |
| LLaVA-G (Zhang et al., 2023a) | 89.16 | – | – | 81.68 | – | – | 84.82 | – | 83.03 | 83.62 |
| VistaLLM (Pramanick et al., 2023) | 88.1 | 91.5 | 83.0 | 82.9 | 89.8 | 74.8 | 83.6 | 84.4 | – | – |
| Ferret-7B (You et al., 2023) | 87.49 | 91.35 | 82.45 | 80.78 | 87.38 | 73.14 | 83.93 | 84.76 | 80.39 | 82.21 |
| Ferret-v2-7B (Ours) | 92.79 | 94.68 | 88.69 | 87.35 | 92.75 | 79.3 | 89.42 | 89.27 | 85.52 | 85.83 |
| Shikra-13B (Chen et al., 2023b) | 87.83 | 91.11 | 81.81 | 82.89 | 87.79 | 74.41 | 82.64 | 83.16 | 77.41 | 78.44 |
| Griffon v2 (Zhan et al., 2024) | 89.6 | 91.8 | 86.5 | 81.9 | 85.5 | 76.2 | 85.9 | 86.0 | – | 84.8 |
| CogVLM-Grounding-17B (Wang et al., 2023a) | 92.76 | 94.75 | 88.99 | 88.68 | 92.91 | 83.39 | 89.75 | 90.79 | – | – |
| Ferret-13B (You et al., 2023) | 89.48 | 92.41 | 84.36 | 82.81 | 88.14 | 75.17 | 85.83 | 86.34 | 81.13 | 84.76 |
| Ferret-v2-13B (Ours) | 92.64 | 94.95 | 88.86 | 87.39 | 92.05 | 81.36 | 89.43 | 89.99 | 85.33 | 86.25 |
Ferret-Bench.
Ferret-Bench (You et al., 2023) is carefully designed to evaluate and benchmark the fine-grained capability of multimodal conversational models, particularly in their ability to refer to, describe, and reason about specific regions within images, thereby facilitating a more structured evaluation of models’ referring and grounding capabilities in a multimodal context. We use Ferret-Bench to compare Ferret with previous models, including LLaVA (Liu et al., 2023b), Shikra (Chen et al., 2023b), Kosmos-2 (Peng et al., 2023), and Osprey (Yuan et al., 2023). Results are summarized in Table 4.1. Ferret-v2 demonstrates superior performance in all types of tasks, indicating the strong spatial understanding and commonsense reasoning capability of the model.
4.2 Modern MLLM Benchmarks
Ferret has demonstrated remarkable regional reasoning capabilities; however, it falls short of academic benchmarks that typically demand tasks-oriented datasets. For Ferret-v2, we specifically include pseudo-labeled VQA and OCR datasets and also append the special prompt, as mentioned in Sec. 3.4. This strategic enhancement progressively narrows the gap between task-specific region-level analyses and broader, more generalized tasks, thereby extending Ferret-v2’s applicability to encompass both fine-grained and coarse-grained tasks. As presented in Table 4, we benchmark Ferret-v2 against existing MMLMs across a comprehensive suite of 10 benchmarks: VQA(Antol et al., 2015), TextVQA (aka.VQA) (Singh et al., 2019), GQA (Hudson & Manning, 2019), POPE (Li et al., 2023e), MME (Chang et al., 2023), SEED (Li et al., 2023b), LLaVA and LLaVA (Liu et al., 2023b), MM-Vet (Yu et al., 2023b), Obj-Hal (Yu et al., 2023a)). Our models achieve on-par performance with the latest state-of-the-art models, particularly excelling in tasks such as VQAv2, GQA, POPE, etc., which demand precise spatial information for accurate responses.
| Method |
VQA |
GQA |
VQA |
POPE |
MME |
SEED |
LLaVA |
LLaVA |
MM-Vet |
Obj-Hal |
|---|---|---|---|---|---|---|---|---|---|---|
| BLIP-2-13B |
41.0 |
41 |
42.5 |
85.3 |
1293.8 |
46.4 |
– |
38.1 |
22.4 |
– |
| InstructBLIP-7B |
– |
49.2 |
50.1 |
– |
– |
53.4 |
– |
60.9 |
26.2 |
– |
| IDEFICS-9B |
50.9 |
38.4 |
25.9 |
– |
– |
– |
– |
– |
– |
– |
| Qwen-VL-7B |
78.8 |
59.3 |
63.8 |
– |
– |
56.3 |
– |
– |
– |
– |
| Qwen-VL-Chat-7B |
78.2 |
57.5 |
61.5 |
– |
1487.5 |
58.2 |
– |
– |
– |
43.8/23.0 |
| LLaVA-1.5-7B |
78.5 |
62.0 |
58.2 |
85.9 |
1510.7 |
58.6 |
82.7 |
63.4 |
30.5 |
46.3/22.6 |
| Ferret-v2-7B (Ours) | 81.5 | 64.7 | 61.7 | 87.8 | 1510.3 | 58.7 | 89.1 | 67.7 | 34.9 | 23.8/14.7 |
| InstructBLIP-13B |
– |
49.5 |
50.7 |
78.9 |
1212.8 |
– |
– |
58.2 |
25.6 |
– |
| Shikra-13B |
77.4 |
– |
– |
– |
– |
– |
– |
– |
– |
– |
| IDEFICS-80B |
60.0 |
45.2 |
30.9 |
– |
– |
– |
– |
– |
– |
– |
| LLaVA-1.5-13B |
80.0 |
63.3 |
61.3 |
85.9 |
1531.3 |
61.6 |
83.4 |
70.7 |
35.4 |
– |
| LLaVA-1.5-13B-HD | 81.8 |
64.7 |
62.5 |
86.3 |
1500.1 |
62.6 |
– |
72.0 | 39.4 |
– |
| Ferret-v2-13B (Ours) | 81.8 | 64.8 |
62.2 |
88.1 | 1521.4 |
61.7 |
90.7 |
69.9 |
35.7 |
34.7/16.8 |
5 Ablation Studies
In all the ablation studies below, we follow Sec. 3.2 and primarily focusing our evaluation on the disparate models’ performance across the dimensions of referring, grounding, OCR, and reasoning.
Any Resolution Grounding and Referring.
We conduct an ablation study on any resolution grounding and referring. As illustrated in Table 5, accommodating any resolution markedly enhances task performance that necessitates a comprehensive understanding of higher-resolution details. By integrating the best of both global semantics and local details for more precise improved precision in referring tasks across both LVIS and SA datasets. Furthermore, this integration modestly enhances grounding capabilities, suggesting that grounding and referring can derive mutual benefits within our proposed framework.
Multi-Granularity Visual Encoding and Stage-II Pre-training.
Our initial ablation study focuses on incorporating an additional DINOv2 encoder for the encoding of high-resolution patches. We utilize the projector weights from Stage I of CLIP for initialization, followed by fine-tuning in Stage III. As demonstrated in Table 5, the exclusive employment of visual granularity encoding significantly enhances both referring and grounding performance. Furthermore, the introduction of an intermediate Stage II in the pre-training process yields improvements across all evaluated metrics.
6 Conclusions
We present Ferret-v2, a significant upgrade of the vanilla Ferret model. It features advanced capabilities in handling any resolution referring and grounding, multi-granularity visual encoding, and a novel three-stage training pipeline. These improvements enable Ferret-v2 to excel in processing and understanding images with higher resolution and finer detail. Like most MLLMs, Ferret-v2 may produce harmful and counterfactual responses.
Acknowledgment
The authors would like to thank Yizhe Zhang, Yanghao Li, Liangchen Song, and Keen You for valuable guidance, suggestions, and feedback. Additional thanks go to Jiaming Hu, Mingfei Gao for supporting large-scale training. The baseline models used in our experiments are based on the open-source code released in the GitHub repository; we acknowledge all the authors who made their code public, which tremendously accelerates our project progress.
References
- Alayrac et al. (2022) Jean-Baptiste Alayrac, Jeff Donahue, Pauline Luc, Antoine Miech, Iain Barr, Yana Hasson, Karel Lenc, Arthur Mensch, Katherine Millican, Malcolm Reynolds, et al. Flamingo: a visual language model for few-shot learning. NeurIPS, 2022.
- Antol et al. (2015) Stanislaw Antol, Aishwarya Agrawal, Jiasen Lu, Margaret Mitchell, Dhruv Batra, C Lawrence Zitnick, and Devi Parikh. Vqa: Visual question answering. In CVPR, pp. 2425–2433, 2015.
- Bai et al. (2023) Jinze Bai, Shuai Bai, Shusheng Yang, Shijie Wang, Sinan Tan, Peng Wang, Junyang Lin, Chang Zhou, and Jingren Zhou. Qwen-vl: A versatile vision-language model for understanding, localization, text reading, and beyond. arXiv:2308.12966, 2023.
- Chang et al. (2023) Yupeng Chang, Xu Wang, Jindong Wang, Yuan Wu, Linyi Yang, Kaijie Zhu, Hao Chen, Xiaoyuan Yi, Cunxiang Wang, Yidong Wang, et al. A survey on evaluation of large language models. ACM Transactions on Intelligent Systems and Technology, 2023.
- Chen et al. (2023a) Jun Chen, Deyao Zhu, Xiaoqian Shen, Xiang Li, Zechu Liu, Pengchuan Zhang, Raghuraman Krishnamoorthi, Vikas Chandra, Yunyang Xiong, and Mohamed Elhoseiny. Minigpt-v2: large language model as a unified interface for vision-language multi-task learning. arXiv:2310.09478, 2023a.
- Chen et al. (2023b) Keqin Chen, Zhao Zhang, Weili Zeng, Richong Zhang, Feng Zhu, and Rui Zhao. Shikra: Unleashing multimodal llm’s referential dialogue magic. arXiv:2306.15195, 2023b.
- Chen et al. (2023c) Lin Chen, Jisong Li, Xiaoyi Dong, Pan Zhang, Conghui He, Jiaqi Wang, Feng Zhao, and Dahua Lin. Sharegpt4v: Improving large multi-modal models with better captions. arXiv preprint arXiv:2311.12793, 2023c.
- Chen et al. (2020) Yen-Chun Chen, Linjie Li, Licheng Yu, Ahmed El Kholy, Faisal Ahmed, Zhe Gan, Yu Cheng, and Jingjing Liu. Uniter: Universal image-text representation learning. In ECCV, pp. 104–120. Springer, 2020.
- Chowdhery et al. (2022) Aakanksha Chowdhery, Sharan Narang, Jacob Devlin, Maarten Bosma, Gaurav Mishra, Adam Roberts, Paul Barham, Hyung Won Chung, Charles Sutton, Sebastian Gehrmann, et al. Palm: Scaling language modeling with pathways. arXiv preprint arXiv:2204.02311, 2022.
- Gan et al. (2020) Zhe Gan, Yen-Chun Chen, Linjie Li, Chen Zhu, Yu Cheng, and Jingjing Liu. Large-scale adversarial training for vision-and-language representation learning. In NeurIPS, volume 33, pp. 6616–6628, 2020.
- Gao et al. (2024) Peng Gao, Renrui Zhang, Chris Liu, Longtian Qiu, Siyuan Huang, Weifeng Lin, Shitian Zhao, Shijie Geng, Ziyi Lin, Peng Jin, et al. Sphinx-x: Scaling data and parameters for a family of multi-modal large language models. arXiv preprint arXiv:2402.05935, 2024.
- Gupta et al. (2019) Agrim Gupta, Piotr Dollar, and Ross Girshick. Lvis: A dataset for large vocabulary instance segmentation. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 5356–5364, 2019.
- Hong et al. (2023) Wenyi Hong, Weihan Wang, Qingsong Lv, Jiazheng Xu, Wenmeng Yu, Junhui Ji, Yan Wang, Zihan Wang, Yuxiao Dong, Ming Ding, et al. Cogagent: A visual language model for gui agents. arXiv preprint arXiv:2312.08914, 2023.
- Hudson & Manning (2019) Drew A Hudson and Christopher D Manning. Gqa: A new dataset for real-world visual reasoning and compositional question answering. In CVPR, pp. 6700–6709, 2019.
- Jiang et al. (2023) Dongsheng Jiang, Yuchen Liu, Songlin Liu, Xiaopeng Zhang, Jin Li, Hongkai Xiong, and Qi Tian. From clip to dino: Visual encoders shout in multi-modal large language models. arXiv preprint arXiv:2310.08825, 2023.
- Kamath et al. (2021) Aishwarya Kamath, Mannat Singh, Yann LeCun, Gabriel Synnaeve, Ishan Misra, and Nicolas Carion. Mdetr-modulated detection for end-to-end multi-modal understanding. In ICCV, pp. 1780–1790, 2021.
- Kazemzadeh et al. (2014) Sahar Kazemzadeh, Vicente Ordonez, Mark Matten, and Tamara Berg. Referitgame: Referring to objects in photographs of natural scenes. In EMNLP, 2014.
- Kirillov et al. (2023) Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C Berg, Wan-Yen Lo, et al. Segment anything. arXiv:2304.02643, 2023.
- Koh et al. (2023) Jing Yu Koh, Ruslan Salakhutdinov, and Daniel Fried. Grounding language models to images for multimodal inputs and outputs. In ICML, 2023.
- Kuang et al. (2021) Zhanghui Kuang, Hongbin Sun, Zhizhong Li, Xiaoyu Yue, Tsui Hin Lin, Jianyong Chen, Huaqiang Wei, Yiqin Zhu, Tong Gao, Wenwei Zhang, Kai Chen, Wayne Zhang, and Dahua Lin. Mmocr: A comprehensive toolbox for text detection, recognition and understanding. arXiv preprint arXiv:2108.06543, 2021.
- Lai et al. (2023) Xin Lai, Zhuotao Tian, Yukang Chen, Yanwei Li, Yuhui Yuan, Shu Liu, and Jiaya Jia. Lisa: Reasoning segmentation via large language model. arXiv preprint arXiv:2308.00692, 2023.
- Li et al. (2023a) Bo Li, Yuanhan Zhang, Liangyu Chen, Jinghao Wang, Jingkang Yang, and Ziwei Liu. Otter: A multi-modal model with in-context instruction tuning. arXiv:2305.03726, 2023a.
- Li et al. (2023b) Bohao Li, Rui Wang, Guangzhi Wang, Yuying Ge, Yixiao Ge, and Ying Shan. Seed-bench: Benchmarking multimodal llms with generative comprehension. arXiv preprint arXiv:2307.16125, 2023b.
- Li et al. (2023c) Feng Li, Hao Zhang, Peize Sun, Xueyan Zou, Shilong Liu, Jianwei Yang, Chunyuan Li, Lei Zhang, and Jianfeng Gao. Semantic-sam: Segment and recognize anything at any granularity. arXiv:2307.04767, 2023c.
- Li et al. (2023d) Junnan Li, Dongxu Li, Silvio Savarese, and Steven Hoi. Blip-2: Bootstrapping language-image pre-training with frozen image encoders and large language models. arXiv:2301.12597, 2023d.
- Li et al. (2023e) Yifan Li, Yifan Du, Kun Zhou, Jinpeng Wang, Wayne Xin Zhao, and Ji-Rong Wen. Evaluating object hallucination in large vision-language models. arXiv preprint arXiv:2305.10355, 2023e.
- Lin et al. (2014) Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Dollár, and C Lawrence Zitnick. Microsoft coco: Common objects in context. In ECCV, 2014.
- Lin et al. (2023) Ziyi Lin, Chris Liu, Renrui Zhang, Peng Gao, Longtian Qiu, Han Xiao, Han Qiu, Chen Lin, Wenqi Shao, Keqin Chen, et al. Sphinx: The joint mixing of weights, tasks, and visual embeddings for multi-modal large language models. arXiv preprint arXiv:2311.07575, 2023.
- Liu et al. (2023a) Haotian Liu, Chunyuan Li, Yuheng Li, and Yong Jae Lee. Improved baselines with visual instruction tuning. arXiv preprint, 2023a.
- Liu et al. (2023b) Haotian Liu, Chunyuan Li, Qingyang Wu, and Yong Jae Lee. Visual instruction tuning. In NeurIPS, 2023b.
- Liu et al. (2024) Haotian Liu, Chunyuan Li, Yuheng Li, Bo Li, Yuanhan Zhang, Sheng Shen, and Yong Jae Lee. Llava-next: Improved reasoning, ocr, and world knowledge, January 2024. URL https://llava-vl.github.io/blog/2024-01-30-llava-next/.
- Liu et al. (2023c) Shilong Liu, Zhaoyang Zeng, Tianhe Ren, Feng Li, Hao Zhang, Jie Yang, Chunyuan Li, Jianwei Yang, Hang Su, Jun Zhu, et al. Grounding dino: Marrying dino with grounded pre-training for open-set object detection. arXiv preprint arXiv:2303.05499, 2023c.
- Liu et al. (2023d) Zhaoyang Liu, Yinan He, Wenhai Wang, Weiyun Wang, Yi Wang, Shoufa Chen, Qinglong Zhang, Yang Yang, Qingyun Li, Jiashuo Yu, et al. Internchat: Solving vision-centric tasks by interacting with chatbots beyond language. arXiv:2305.05662, 2023d.
- Lv et al. (2023) Tengchao Lv, Yupan Huang, Jingye Chen, Lei Cui, Shuming Ma, Yaoyao Chang, Shaohan Huang, Wenhui Wang, Li Dong, Weiyao Luo, et al. Kosmos-2.5: A multimodal literate model. arXiv preprint arXiv:2309.11419, 2023.
- Mao et al. (2016) Junhua Mao, Jonathan Huang, Alexander Toshev, Oana Camburu, Alan L Yuille, and Kevin Murphy. Generation and comprehension of unambiguous object descriptions. In CVPR, 2016.
- McKinzie et al. (2024) Brandon McKinzie, Zhe Gan, Jean-Philippe Fauconnier, Sam Dodge, Bowen Zhang, Philipp Dufter, Dhruti Shah, Xianzhi Du, Futang Peng, Floris Weers, et al. Mm1: Methods, analysis & insights from multimodal llm pre-training. arXiv preprint arXiv:2403.09611, 2024.
- OpenAI (2023) OpenAI. GPT-4 technical report. arXiv:2303.08774, 2023.
- OpenAI (2022) TB OpenAI. Chatgpt: Optimizing language models for dialogue. openai, 2022.
- Oquab et al. (2023) Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy Vo, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. Dinov2: Learning robust visual features without supervision. arXiv preprint arXiv:2304.07193, 2023.
- Peng et al. (2023) Zhiliang Peng, Wenhui Wang, Li Dong, Yaru Hao, Shaohan Huang, Shuming Ma, and Furu Wei. Kosmos-2: Grounding multimodal large language models to the world. arXiv:2306.14824, 2023.
- Pi et al. (2023) Renjie Pi, Jiahui Gao, Shizhe Diao, Rui Pan, Hanze Dong, Jipeng Zhang, Lewei Yao, Jianhua Han, Hang Xu, Lingpeng Kong, and Tong Zhang. Detgpt: Detect what you need via reasoning. arXiv:2305.14167, 2023.
- Plummer et al. (2015) Bryan A Plummer, Liwei Wang, Chris M Cervantes, Juan C Caicedo, Julia Hockenmaier, and Svetlana Lazebnik. Flickr30k entities: Collecting region-to-phrase correspondences for richer image-to-sentence models. In CVPR, pp. 2641–2649, 2015.
- Pramanick et al. (2023) Shraman Pramanick, Guangxing Han, Rui Hou, Sayan Nag, Ser-Nam Lim, Nicolas Ballas, Qifan Wang, Rama Chellappa, and Amjad Almahairi. Jack of all tasks, master of many: Designing general-purpose coarse-to-fine vision-language model. arXiv preprint arXiv:2312.12423, 2023.
- Radford et al. (2021) Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. Learning transferable visual models from natural language supervision. In International Conference on Machine Learning, pp. 8748–8763. PMLR, 2021.
- Sidorov et al. (2020) Oleksii Sidorov, Ronghang Hu, Marcus Rohrbach, and Amanpreet Singh. Textcaps: a dataset for image captioning with reading comprehension. In Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part II 16, pp. 742–758. Springer, 2020.
- Singh et al. (2019) Amanpreet Singh, Vivek Natarajan, Meet Shah, Yu Jiang, Xinlei Chen, Dhruv Batra, Devi Parikh, and Marcus Rohrbach. Towards vqa models that can read. In CVPR, pp. 8317–8326, 2019.
- Sun et al. (2023) Quan Sun, Yuxin Fang, Ledell Wu, Xinlong Wang, and Yue Cao. Eva-clip: Improved training techniques for clip at scale. arXiv preprint arXiv:2303.15389, 2023.
- Touvron et al. (2023a) Hugo Touvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Timothée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar, et al. Llama: Open and efficient foundation language models. arXiv preprint arXiv:2302.13971, 2023a.
- Touvron et al. (2023b) Hugo Touvron, Louis Martin, Kevin Stone, Peter Albert, Amjad Almahairi, Yasmine Babaei, Nikolay Bashlykov, Soumya Batra, Prajjwal Bhargava, Shruti Bhosale, et al. Llama 2: Open foundation and fine-tuned chat models. arXiv preprint arXiv:2307.09288, 2023b.
- Wang et al. (2022) Peng Wang, An Yang, Rui Men, Junyang Lin, Shuai Bai, Zhikang Li, Jianxin Ma, Chang Zhou, Jingren Zhou, and Hongxia Yang. Ofa: Unifying architectures, tasks, and modalities through a simple sequence-to-sequence learning framework. In International Conference on Machine Learning, pp. 23318–23340. PMLR, 2022.
- Wang et al. (2023a) Weihan Wang, Qingsong Lv, Wenmeng Yu, Wenyi Hong, Ji Qi, Yan Wang, Junhui Ji, Zhuoyi Yang, Lei Zhao, Xixuan Song, et al. Cogvlm: Visual expert for pretrained language models. arXiv preprint arXiv:2311.03079, 2023a.
- Wang et al. (2023b) Weiyun Wang, Min Shi, Qingyun Li, Wenhai Wang, Zhenhang Huang, Linjie Xing, Zhe Chen, Hao Li, Xizhou Zhu, Zhiguo Cao, et al. The all-seeing project: Towards panoptic visual recognition and understanding of the open world. arXiv preprint arXiv:2308.01907, 2023b.
- Wang et al. (2023c) Wenhai Wang, Zhe Chen, Xiaokang Chen, Jiannan Wu, Xizhou Zhu, Gang Zeng, Ping Luo, Tong Lu, Jie Zhou, Yu Qiao, et al. Visionllm: Large language model is also an open-ended decoder for vision-centric tasks. arXiv:2305.11175, 2023c.
- Wei et al. (2021) Jason Wei, Maarten Bosma, Vincent Zhao, Kelvin Guu, Adams Wei Yu, Brian Lester, Nan Du, Andrew M Dai, and Quoc V Le. Finetuned language models are zero-shot learners. In ICLR, 2021.
- Wu et al. (2023a) Chenfei Wu, Shengming Yin, Weizhen Qi, Xiaodong Wang, Zecheng Tang, and Nan Duan. Visual chatgpt: Talking, drawing and editing with visual foundation models. arXiv:2303.04671, 2023a.
- Wu et al. (2023b) Tsung-Han Wu, Giscard Biamby, David Chan, Lisa Dunlap, Ritwik Gupta, Xudong Wang, Joseph E. Gonzalez, and Trevor Darrell. See, say, and segment: Teaching lmms to overcome false premises. arXiv:2312.08366, 2023b.
- Wu et al. (2023c) Xiaoyang Wu, Zhuotao Tian, Xin Wen, Bohao Peng, Xihui Liu, Kaicheng Yu, and Hengshuang Zhao. Towards large-scale 3d representation learning with multi-dataset point prompt training. arXiv:2308.09718, 2023c.
- Yang et al. (2022) Zhengyuan Yang, Zhe Gan, Jianfeng Wang, Xiaowei Hu, Faisal Ahmed, Zicheng Liu, Yumao Lu, and Lijuan Wang. Unitab: Unifying text and box outputs for grounded vision-language modeling. In ECCV, pp. 521–539. Springer, 2022.
- Yang et al. (2023) Zhengyuan Yang, Linjie Li, Jianfeng Wang, Kevin Lin, Ehsan Azarnasab, Faisal Ahmed, Zicheng Liu, Ce Liu, Michael Zeng, and Lijuan Wang. Mm-react: Prompting chatgpt for multimodal reasoning and action. arXiv:2303.11381, 2023.
- Ye et al. (2023) Qinghao Ye, Haiyang Xu, Guohai Xu, Jiabo Ye, Ming Yan, Yiyang Zhou, Junyang Wang, Anwen Hu, Pengcheng Shi, Yaya Shi, et al. mplug-owl: Modularization empowers large language models with multimodality. arXiv:2304.14178, 2023.
- You et al. (2023) Haoxuan You, Haotian Zhang, Zhe Gan, Xianzhi Du, Bowen Zhang, Zirui Wang, Liangliang Cao, Shih-Fu Chang, and Yinfei Yang. Ferret: Refer and ground anything anywhere at any granularity. arXiv:2310.07704, 2023.
- Yu et al. (2016) Licheng Yu, Patrick Poirson, Shan Yang, Alexander C Berg, and Tamara L Berg. Modeling context in referring expressions. In ECCV. Springer, 2016.
- Yu et al. (2018) Licheng Yu, Zhe Lin, Xiaohui Shen, Jimei Yang, Xin Lu, Mohit Bansal, and Tamara L Berg. Mattnet: Modular attention network for referring expression comprehension. In CVPR, pp. 1307–1315, 2018.
- Yu et al. (2023a) Tianyu Yu, Yuan Yao, Haoye Zhang, Taiwen He, Yifeng Han, Ganqu Cui, Jinyi Hu, Zhiyuan Liu, Hai-Tao Zheng, Maosong Sun, et al. Rlhf-v: Towards trustworthy mllms via behavior alignment from fine-grained correctional human feedback. arXiv preprint arXiv:2312.00849, 2023a.
- Yu et al. (2023b) Weihao Yu, Zhengyuan Yang, Linjie Li, Jianfeng Wang, Kevin Lin, Zicheng Liu, Xinchao Wang, and Lijuan Wang. Mm-vet: Evaluating large multimodal models for integrated capabilities. arXiv preprint arXiv:2308.02490, 2023b.
- Yuan et al. (2023) Yuqian Yuan, Wentong Li, Jian Liu, Dongqi Tang, Xinjie Luo, Chi Qin, Lei Zhang, and Jianke Zhu. Osprey: Pixel understanding with visual instruction tuning. arXiv preprint arXiv:2312.10032, 2023.
- Zhan et al. (2024) Yufei Zhan, Yousong Zhu, Hongyin Zhao, Fan Yang, Ming Tang, and Jinqiao Wang. Griffon v2: Advancing multimodal perception with high-resolution scaling and visual-language co-referring. arXiv preprint arXiv:2403.09333, 2024.
- Zhang et al. (2023a) Hao Zhang, Hongyang Li, Feng Li, Tianhe Ren, Xueyan Zou, Shilong Liu, Shijia Huang, Jianfeng Gao, Lei Zhang, Chunyuan Li, et al. Llava-grounding: Grounded visual chat with large multimodal models. arXiv preprint arXiv:2312.02949, 2023a.
- Zhang et al. (2022a) Haotian Zhang, Pengchuan Zhang, Xiaowei Hu, Yen-Chun Chen, Liunian Li, Xiyang Dai, Lijuan Wang, Lu Yuan, Jenq-Neng Hwang, and Jianfeng Gao. Glipv2: Unifying localization and vision-language understanding. Advances in Neural Information Processing Systems, 35:36067–36080, 2022a.
- Zhang et al. (2023b) Shilong Zhang, Peize Sun, Shoufa Chen, Min Xiao, Wenqi Shao, Wenwei Zhang, Kai Chen, and Ping Luo. Gpt4roi: Instruction tuning large language model on region-of-interest. arXiv:2307.03601, 2023b.
- Zhang et al. (2022b) Susan Zhang, Stephen Roller, Naman Goyal, Mikel Artetxe, Moya Chen, Shuohui Chen, Christopher Dewan, Mona Diab, Xian Li, Xi Victoria Lin, et al. Opt: Open pre-trained transformer language models. arXiv preprint arXiv:2205.01068, 2022b.
- Zhao et al. (2023) Yang Zhao, Zhijie Lin, Daquan Zhou, Zilong Huang, Jiashi Feng, and Bingyi Kang. Bubogpt: Enabling visual grounding in multi-modal llms. arXiv preprint arXiv:2307.08581, 2023.
- Zheng et al. (2023) Lianmin Zheng, Wei-Lin Chiang, Ying Sheng, Siyuan Zhuang, Zhanghao Wu, Yonghao Zhuang, Zi Lin, Zhuohan Li, Dacheng Li, Eric. P Xing, Hao Zhang, Joseph E. Gonzalez, and Ion Stoica. Judging llm-as-a-judge with mt-bench and chatbot arena, 2023.
- Zhu et al. (2023) Deyao Zhu, Jun Chen, Xiaoqian Shen, Xiang Li, and Mohamed Elhoseiny. Minigpt-4: Enhancing vision-language understanding with advanced large language models. arXiv:2304.10592, 2023.
- Zou et al. (2023) Xueyan Zou, Jianwei Yang, Hao Zhang, Feng Li, Linjie Li, Jianfeng Gao, and Yong Jae Lee. Segment everything everywhere all at once. arXiv:2304.06718, 2023.